Research Publications
Graph-NOTS: A Multi-Scale Persistence Kernel for Unsupervised Detection of Stealthy Botnet C2 Traffic
Md Arif Faysal Nayem
IEEE Access, 2026
Abstract
Botnet command-and-control (C2) traffic is among the hardest classes of intrusion to detect: individual bots generate sparse flows indistinguishable from normal host activity. Graph-NOTS introduces the Multi-Scale Persistence Kernel (MSPK), an unsupervised framework that analyzes communication-graph topology via principled multi-scale persistent homology. On the CTU-13 real botnet dataset, MSPK achieves AUC-ROC 0.869 and PR-AUC 0.851 — outperforming the volumetric baseline by +28.7 AUC points — with only ~9.7 ms per-window overhead on commodity hardware, viable for real-time inline NIDS deployment.
Multi-Kernel Fusion of Topological and Hand-Crafted Features for ECG Abnormality Detection on PTB-XL
Md Arif Faysal Nayem, Ohidujjaman, Suman Ahmmed
IEEE Access, 2024
Abstract
We investigate whether topological features derived from persistent homology complement hand-crafted ECG features for binary normal/abnormal classification. A fixed-weight kernel fusion (MK-Fusion) combining separate RBF kernels on topological and hand-crafted feature spaces achieves AUC = 0.874 on PTB-XL (21,837 clinical 12-lead ECGs) — the highest among all feature-based classifiers, with statistically significant gains (DeLong's test, p < 0.001). Results indicate persistence landscapes encode complementary geometric information about the cardiac attractor.
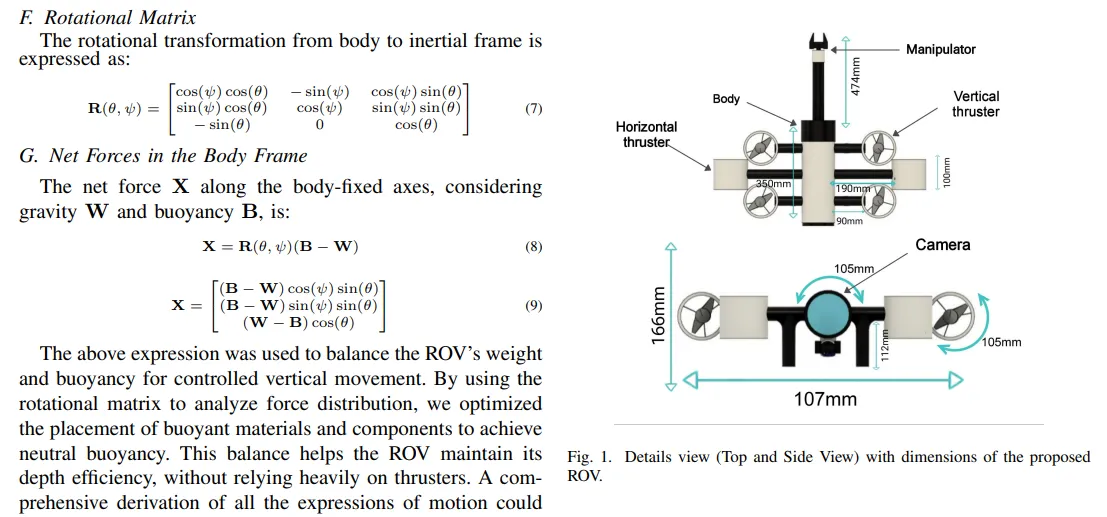
TritonZ: A Remotely Operated Underwater Rover with Manipulator Arm for Exploration and Rescue Operations
Kawser Ahmed, Mir Shahriar Fardin, Md Arif Faysal Nayem, Fahim Hafiz, Swakkhar Shatabda
27th International Conference on Computer and Information Technology (ICCIT), 2024
Abstract
TritonZ is a remotely operated underwater rover with a manipulator arm for exploration and rescue. Integrates real-time video streaming, advanced navigation, and precise control for challenging aquatic environments.